Instrumentasi Tahap Sesaran dan Sesaran
Instrumentasi Tahap Sesaran dan Sesaran
Ketidakpuasan hati instrumen tahap mengeksploitasi Prinsip Archimedes untuk mengesan aras cecair dengan mengukur berat objek secara berterusan (dipanggil rasa tidak senang) direndam dalam cecair proses. Apabila aras cecair meningkat, penyesar mengalami daya apungan yang lebih besar, menjadikannya kelihatan lebih ringan kepada instrumen pengesan, yang mentafsirkan kehilangan berat sebagai peningkatan aras dan menghantar isyarat output berkadar.
Ketidakpuasan hati instrumen aras
Dalam praktiknya, instrumen aras penyesar biasanya mengambil bentuk berikut. Perpaipan proses masuk dan keluar dari bekas telah diabaikan untuk memudahkan – hanya bekas dan instrumen aras penyesarnya ditunjukkan:
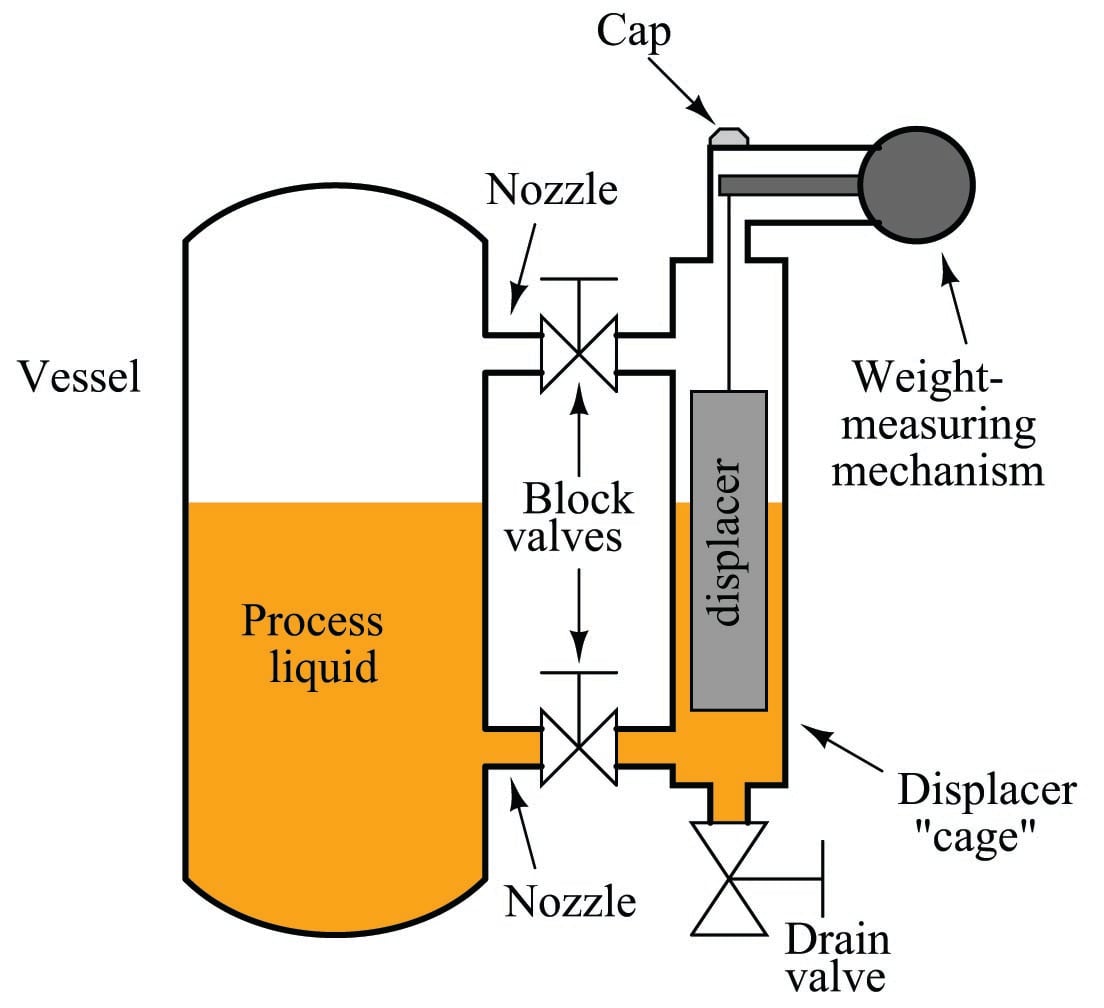
Ketidakpuasan hati instrumen arasIa biasanya merupakan tiub logam yang tertutup rapat, ditimbang secukupnya supaya ia tidak terapung dalam cecair proses. Ia tergantung di dalam paip yang dipanggil "sangkar" yang disambungkan ke bekas proses melalui dua injap blok dan muncung. Kedua-dua sambungan paip ini memastikan paras cecair di dalam sangkar sepadan dengan paras cecair di dalam bekas proses, seperti kaca penglihatan.
Jika paras cecair di dalam bekas proses meningkat, paras cecair di dalam sangkar akan meningkat mengikut tahap yang sama. Ini akan menenggelamkan lebih banyak isipadu penyesar, menyebabkan daya apungan dikenakan ke atas pada penyesar. Ingat bahawa penyesar terlalu berat untuk terapung, jadi ia tidak "terjun" di atas permukaan cecair dan juga tidak naik dalam jumlah yang sama dengan paras cecair – sebaliknya, ia tergantung di tempatnya di dalam sangkar, menjadi "lebih ringan" apabila daya apungan meningkat. Mekanisme pengesanan berat mengesan daya apungan ini apabila ia melihat penyesar menjadi lebih ringan, mentafsirkan penurunan berat (ketara) sebagai peningkatan paras cecair. Berat ketara penyesar mencapai tahap minimum apabila ia tenggelam sepenuhnya, apabila cecair proses telah mencapai titik 100% di dalam sangkar.
Perlu diingatkan bahawa tekanan statik di dalam bekas akan memberi kesan yang kecil terhadap ketepatan instrumen penyesar. Satu-satunya faktor yang penting ialah ketumpatan bendalir proses, kerana daya apungan berkadar terus dengan ketumpatan bendalir (
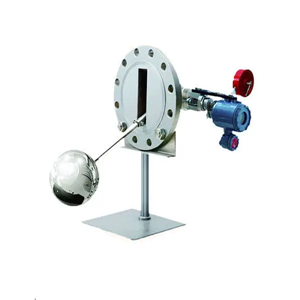
Gambar berikut menunjukkan pemancar pneumatik model Fisher “Level-Trol” yang mengukur paras kondensat dalam dram kalah mati untuk perkhidmatan gas asli. Instrumen itu sendiri muncul di sebelah kanan foto, dihiasi dengan "kepala" berwarna kelabu dengan dua tolok tekanan pneumatik yang kelihatan. "Sangkar" penyesar ialah paip menegak betul-betul di belakang dan di bawah unit kepala. Perhatikan bahawa tolok paras kaca penglihatan muncul di sebelah kiri ruang kalah mati (atau but kondensat) untuk petunjuk visual paras kondensat di dalam bekas proses:

Tujuan instrumen penyesar khusus ini adalah untuk mengukur jumlah cecair kondensat yang terkumpul di dalam "but". Model Fisher Level-Trol ini didatangkan lengkap dengan mekanisme pengawal pneumatik yang menghantar isyarat tekanan udara ke injap longkang untuk mengalirkan kondensat keluar dari but secara automatik.
Dua gambar instrumen penyesar Level-Trol yang telah dibongkar dipaparkan di sini, menunjukkan bagaimana penyesar itu muat di dalam paip sangkar:


Paip sangkar digandingkan dengan bekas proses melalui dua injap blok, membolehkan pengasingan daripada proses. Injap longkang membolehkan sangkar dikosongkan daripada cecair proses untuk servis instrumen dan penentukuran sifar.
Sesetengah sensor aras jenis penyesar tidak menggunakan sangkar, tetapi sebaliknya menggantung elemen penyesar terus di dalam bekas proses. Ini dipanggil sensor "tanpa sangkar". Instrumen tanpa sangkar sudah tentu lebih mudah daripada instrumen jenis sangkar, tetapi ia tidak boleh diservis tanpa mengurangkan tekanan (dan mungkin juga mengosongkan) bekas proses tempat ia berada. Ia juga mudah terdedah kepada ralat pengukuran dan "bunyi bising" jika cecair di dalam bekas dikacau, sama ada oleh halaju aliran tinggi masuk dan keluar dari bekas, atau oleh tindakan pendesak berpusing motor yang dipasang di dalam bekas untuk menyediakan pencampuran cecair proses yang menyeluruh.
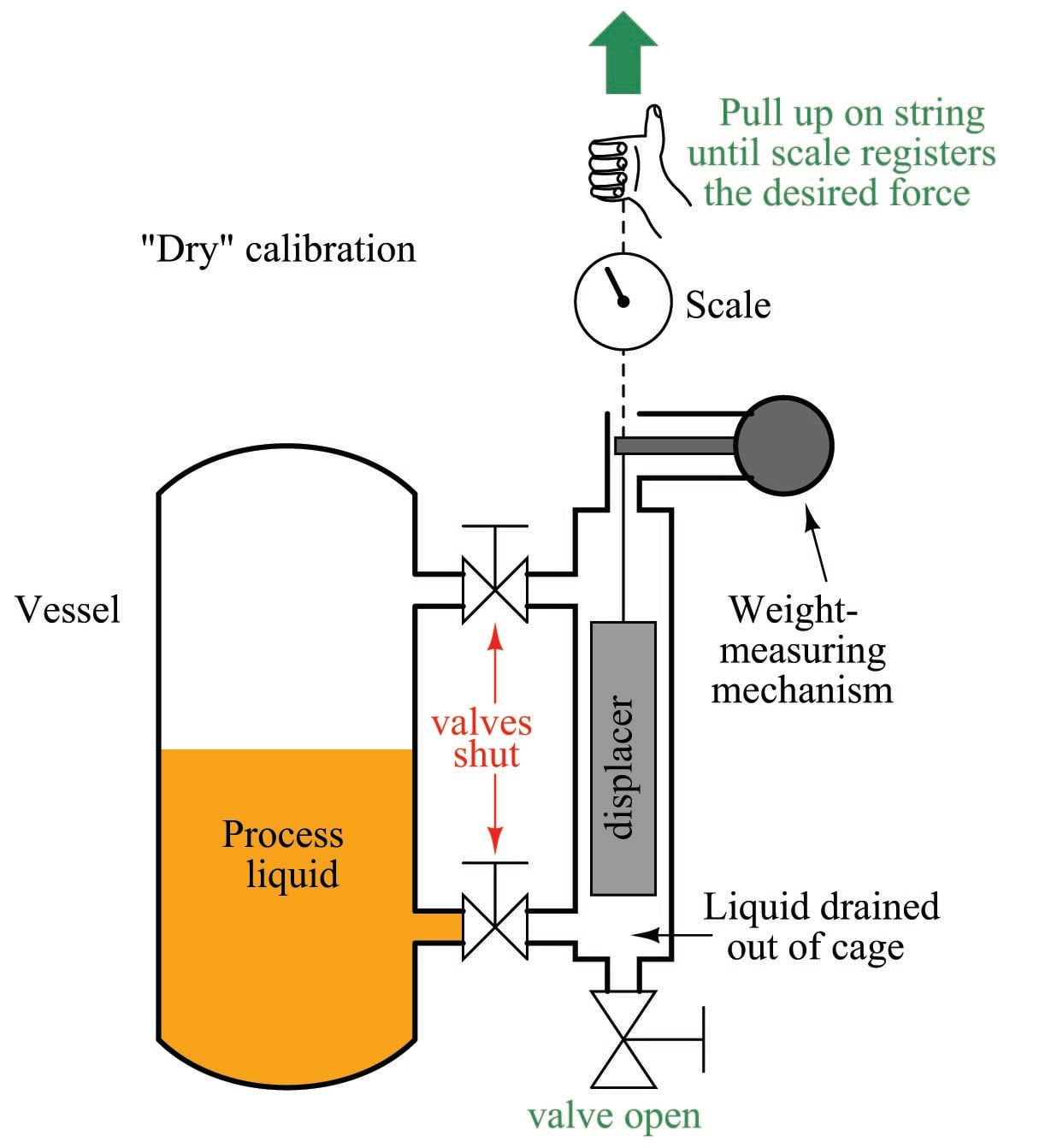
Penentukuran julat penuh boleh dilakukan dengan membanjiri sangkar dengan cecair proses (a basah penentukuran), atau dengan menggantung penyesar dengan tali dan skala yang tepat (a kering penentukuran), menarik ke atas pada penyesar pada jumlah yang tepat untuk mensimulasikan keapungan pada aras cecair 100%:
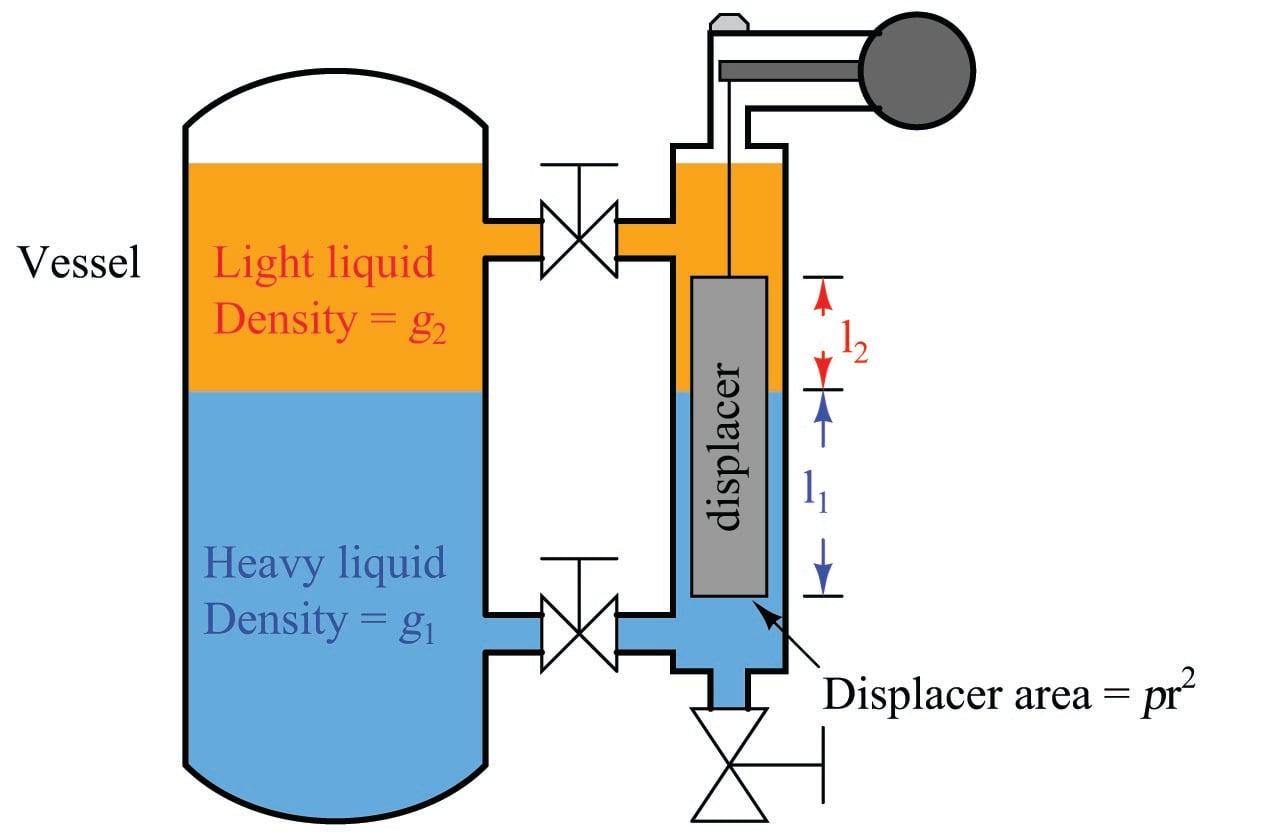
Pengiraan daya apungan ini adalah perkara yang mudah. Menurut Prinsip Archimedes, daya apungan sentiasa sama dengan berat isipadu bendalir yang disesarkan. Dalam kes instrumen aras berasaskan penyesar pada jarak penuh, ini biasanya bermaksud keseluruhan isipadu elemen penyesar terendam dalam cecair. Kirakan sahaja isipadu penyesar (jika ia adalah silinder,
Contohnya, jika ketumpatan berat bendalir proses ialah 57.3 paun setiap kaki padu dan penyesarnya ialah silinder berukuran 3 inci diameter dan 24 inci panjang, daya yang diperlukan untuk mensimulasikan keadaan keapungan pada aras penuh boleh dikira seperti berikut:
Perhatikan betapa pentingnya mengekalkan konsistensi unit! Ketumpatan cecair diberikan dalam unit paun setiap padu kaki dan dimensi penyesar dalam inci, yang akan menyebabkan masalah serius tanpa penukaran antara kaki dan inci. Dalam contoh kerja saya, saya memilih untuk menukar ketumpatan kepada unit paun per inci padu, tetapi saya boleh menukar dimensi penyesar kepada kaki dengan mudah untuk mencapai isipadu penyesar dalam unit kaki padu.
Dalam penentukuran "basah", daya apungan 5.63 paun akan dihasilkan oleh cecair itu sendiri, dan juruteknik memastikan terdapat cecair yang mencukupi di dalam sangkar untuk mensimulasikan keadaan aras 100%. Dalam penentukuran "kering", daya apungan akan disimulasikan oleh tegangan yang dikenakan ke atas pada penyesar dengan penimbang tangan dan tali, juruteknik menarik dengan daya ke atas sebanyak 5.63 paun untuk membuat instrumen "berfikir" ia mengesan aras cecair 100% sedangkan sebenarnya penyesar itu benar-benar kering, tergantung di udara.
Tiub tork Ketidakpuasan hati instrumen aras
Satu masalah reka bentuk yang menarik untuk pemancar aras jenis anjakan ialah cara memindahkan berat penyesar yang dikesan ke mekanisme pemancar sambil menutup tekanan wap proses secara positif daripada mekanisme yang sama. Penyelesaian paling biasa untuk masalah ini ialah mekanisme bijak yang dipanggil tiub torkMalangnya, tiub tork agak sukar difahami melainkan anda mempunyai akses langsung kepadanya, jadi bahagian ini akan meneroka konsep ini dengan lebih terperinci daripada yang biasanya terdapat dalam manual rujukan.
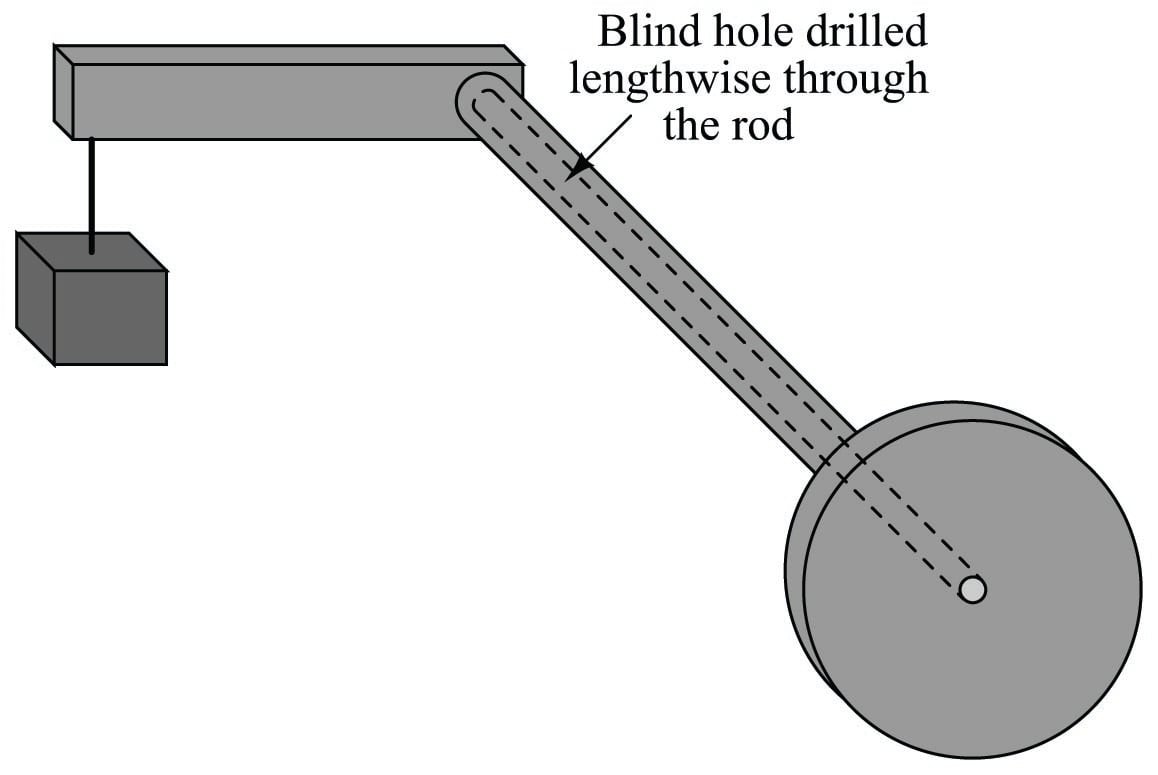
Bayangkan rod logam yang kukuh dan mendatar dengan bebibir di satu hujung dan tuil serenjang di hujung yang satu lagi. Bebibir dipasang pada permukaan pegun dan pemberat digantung dari hujung tuil. Bulatan garis putus-putus menunjukkan di mana rod dikimpal pada tengah bebibir:
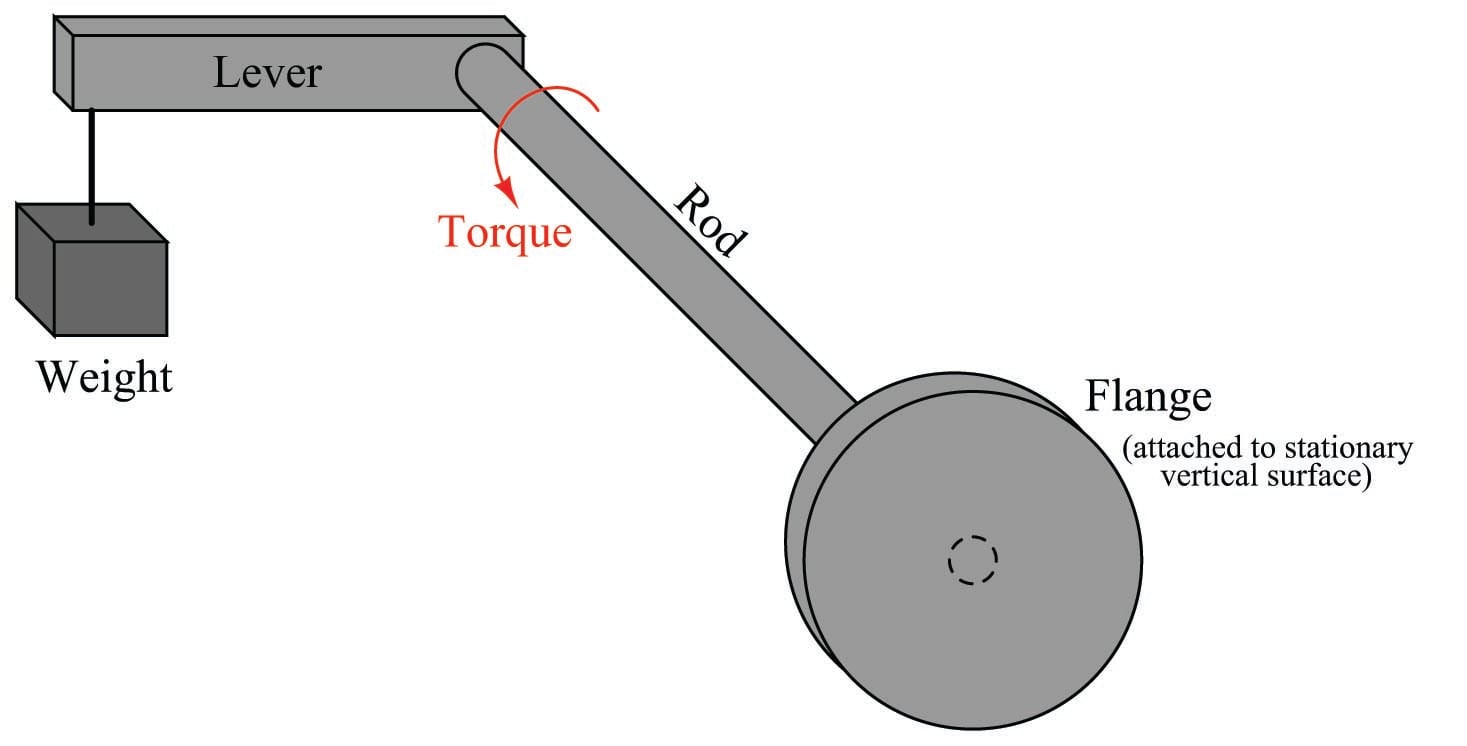
Daya pemberat ke bawah yang bertindak pada tuil memberikan daya putaran (tork) kepada rod, menyebabkan ia sedikit berpusing sepanjang panjangnya. Lebih banyak pemberat yang digantung di hujung tuil, lebih banyak rod akan berpusing. Selagi tork yang dikenakan oleh pemberat dan tuil tidak pernah melebihi had elastik rod, rod akan terus bertindak sebagai pegas. Jika kita mengetahui "pemalar pegas" rod, dan mengukur pesongan kilasannya, kita sebenarnya boleh menggunakan gerakan ringan ini untuk mengukur magnitud pemberat yang digantung di hujung tuil.
Digunakan pada instrumen aras jenis penyesar, penyesar menggantikan pemberat di hujung tuil, pesongan kilasan rod ini berfungsi untuk menunjukkan daya apungan. Apabila cecair naik, daya apungan pada penyesar meningkat, menjadikan penyesar kelihatan lebih ringan dari perspektif rod. Gerakan sedikit rod yang terhasil daripada perubahan berat yang ketara ini, kemudian, menunjukkan aras cecair.
Sekarang bayangkan menggerudi lubang panjang melalui rod, secara memanjang, yang hampir sampai ke hujung tempat tuil dipasang. Dalam erti kata lain, bayangkan sebuah lubang buta melalui tengah rod, bermula pada bebibir dan berakhir berhampiran tuil:
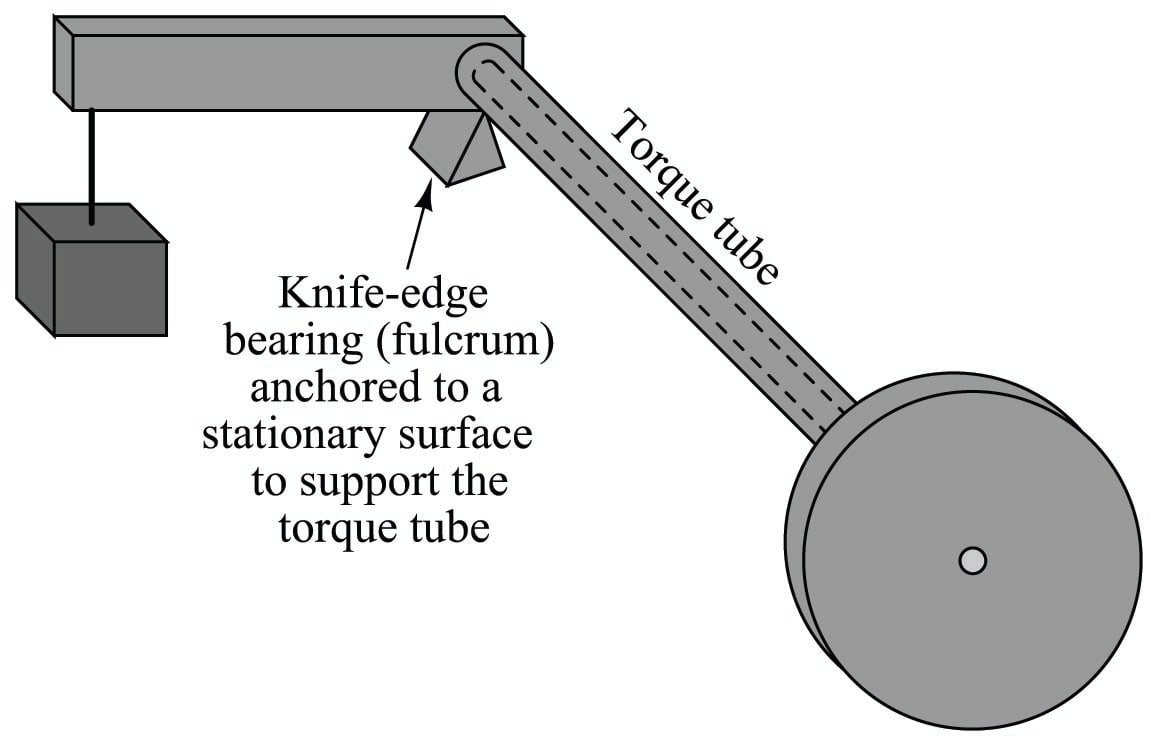
Kehadiran lubang panjang ini tidak banyak mengubah kelakuan pemasangan, kecuali mungkin mengubah pemalar pegas rod. Dengan logam yang kurang kukuh, rod akan menjadi pegas yang lebih lemah, dan akan berpusing ke tahap yang lebih besar dengan berat yang dikenakan pada hujung tuil. Walau bagaimanapun, yang lebih penting untuk tujuan perbincangan ini, lubang panjang mengubah rod menjadi tiub dengan hujung yang tertutup. Daripada menjadi "bar kilasan," rod kini lebih tepat dipanggil tiub tork, berpusing sedikit dengan berat dikenakan di hujung tuil.
Untuk memberikan sokongan menegak tiub tork supaya ia tidak kendur ke bawah dengan berat yang dikenakan, satu penyokong galas tepi pisau selalunya diletakkan di bawah hujung tuil di mana ia dipasang pada tiub tork. Tujuan titik tumpu ini adalah untuk memberikan sokongan menegak untuk berat sambil membentuk titik pangsi yang hampir tanpa geseran, memastikan satu-satunya tegasan yang dikenakan pada tiub tork adalah tork dari tuas:
Akhir sekali, bayangkan satu lagi rod logam pepejal (diameter sedikit lebih kecil daripada lubang) yang dikimpal secara spot-kimpal ke hujung lubang buta, memanjang keluar melepasi hujung bebibir:
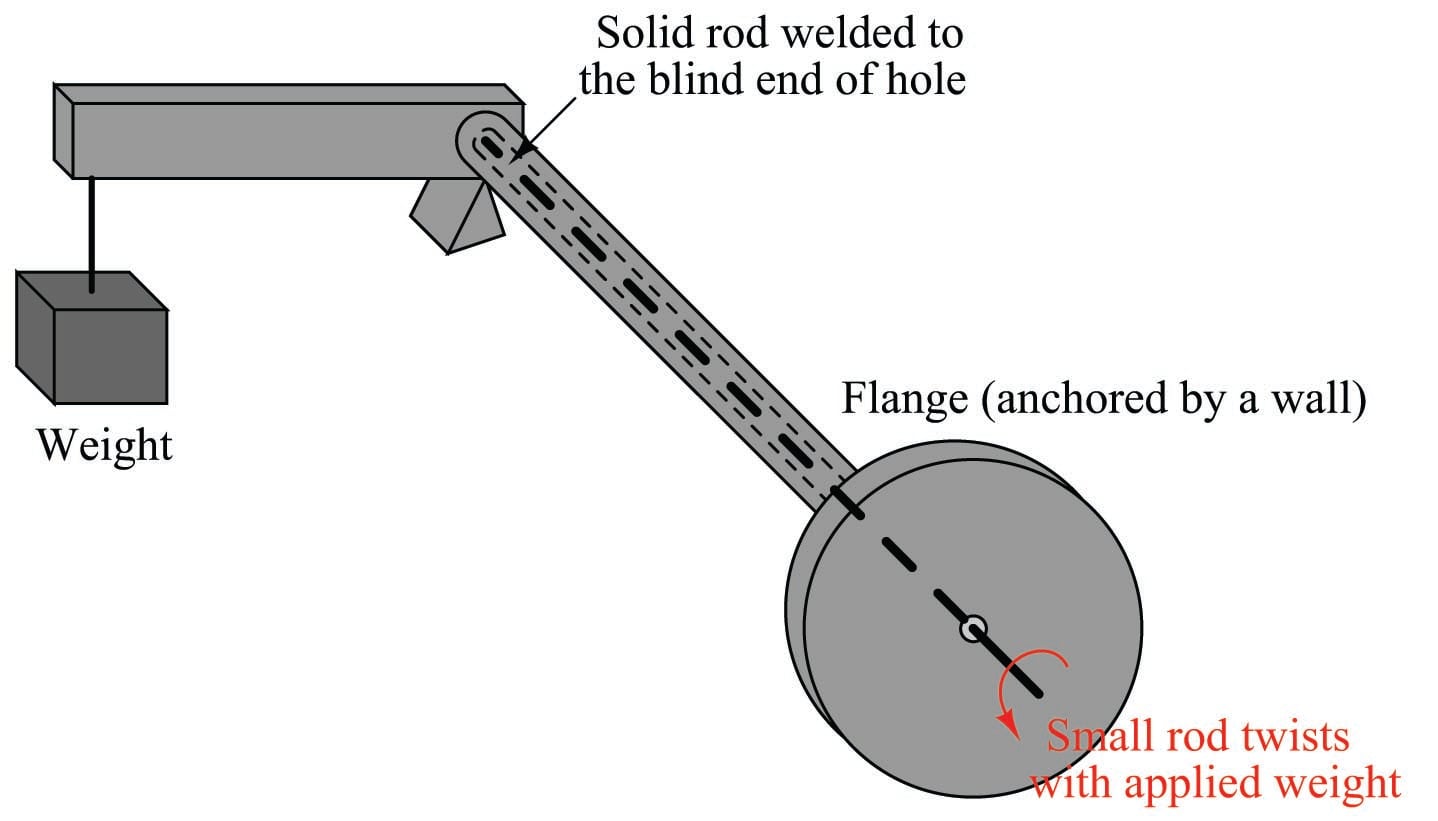
Tujuan rod berdiameter lebih kecil ini adalah untuk memindahkan gerakan memutar hujung tiub tork ke titik melepasi bebibir di mana ia mungkin dapat dikesan. Bayangkan bebibir berlabuh pada dinding menegak, sementara pemberat boleh ubah menarik ke bawah di hujung tuil. Tiub tork akan melentur dalam gerakan memutar dengan daya boleh ubah, tetapi sekarang kita dapat melihat betapa banyaknya ia memutar dengan memerhatikan putaran rod yang lebih kecil di bahagian dekat dinding. Pemberat dan tuil mungkin tersembunyi sepenuhnya daripada pandangan kita oleh dinding ini, tetapi gerakan memutar rod kecil itu tetap mendedahkan berapa banyak tiub tork yang tunduk kepada daya pemberat.
Kita boleh menggunakan mekanisme tiub tork ini untuk tugas mengukur paras cecair dalam bekas bertekanan dengan menggantikan pemberat dengan penyesar, memasang bebibir pada muncung yang dikimpal pada bekas, dan menyelaraskan peranti pengesan gerakan dengan hujung rod kecil untuk mengukur putarannya. Apabila paras cecair naik dan turun, berat ketara penyesar berbeza-beza, menyebabkan tiub tork sedikit berpusing. Gerakan berpusing sedikit ini kemudiannya dikesan di hujung rod kecil, dalam persekitaran yang terasing daripada tekanan bendalir proses.
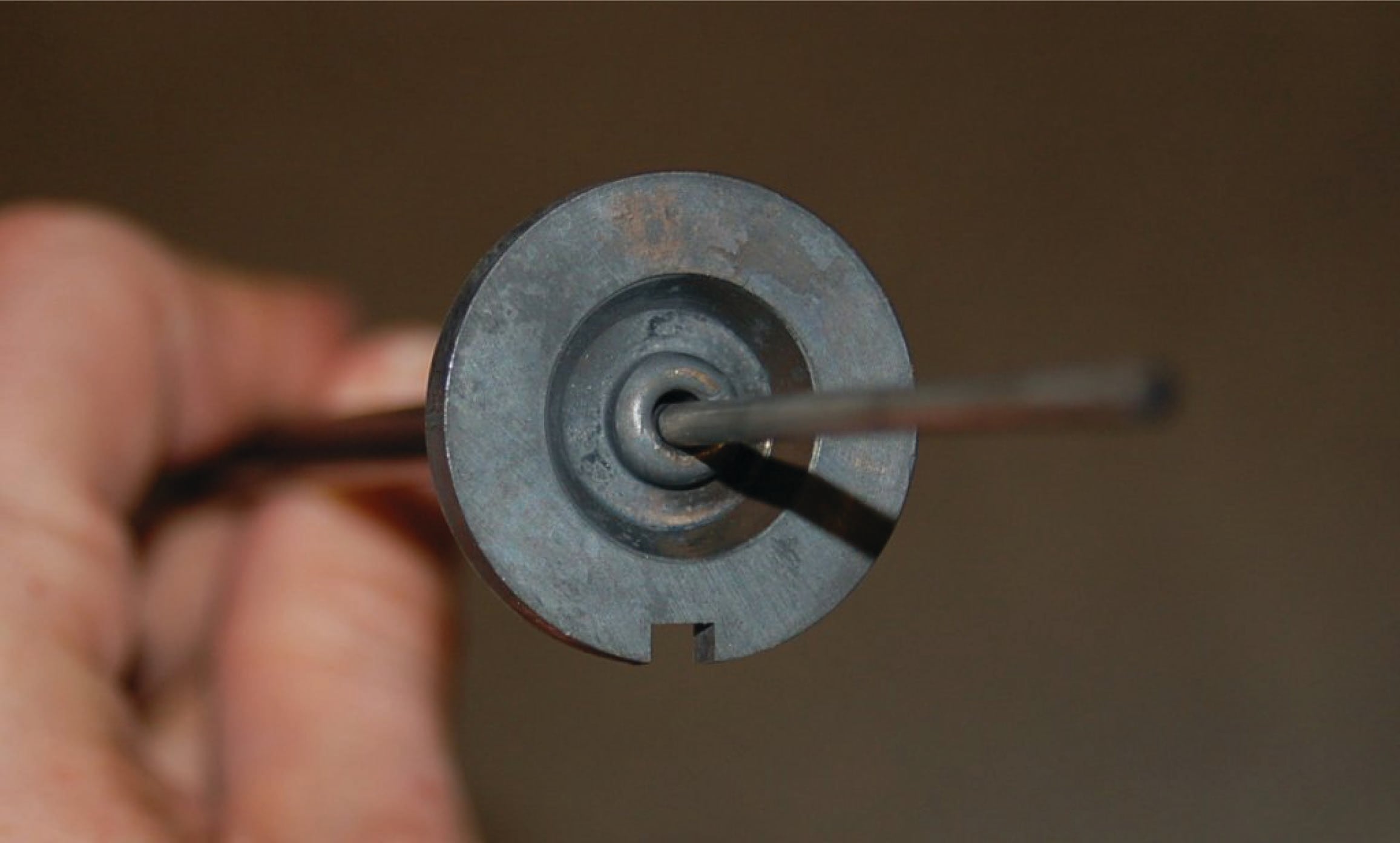
Gambar yang diambil daripada tiub tork sebenar daripada pemancar aras Fisher “Level-Trol” menunjukkan rupa luarannya:

Logam berwarna gelap ialah keluli elastik yang digunakan untuk menggantung berat dengan bertindak sebagai pegas kilasan, manakala bahagian berkilat ialah rod dalam yang digunakan untuk memindahkan gerakan. Seperti yang anda lihat, tiub tork itu sendiri berdiameter tidak begitu lebar. Jika ya, ia akan menjadi pegas yang terlalu keras untuk digunakan secara praktikal dalam instrumen aras jenis penyesar, kerana penyesar biasanya tidak begitu berat, dan tuilnya tidak panjang.
Melihat lebih dekat pada setiap hujung tiub tork mendedahkan hujung terbuka di mana rod berdiameter kecil menonjol (kiri) dan hujung "buta" tiub di mana ia dipasang pada tuil (kanan):

Jika kita memotong pemasangan tiub tork menjadi separuh, secara memanjang, keratan rentasnya akan kelihatan seperti ini:

Ilustrasi seterusnya menunjukkan tiub tork sebagai sebahagian daripada pemancar aras gaya anjakan keseluruhan:
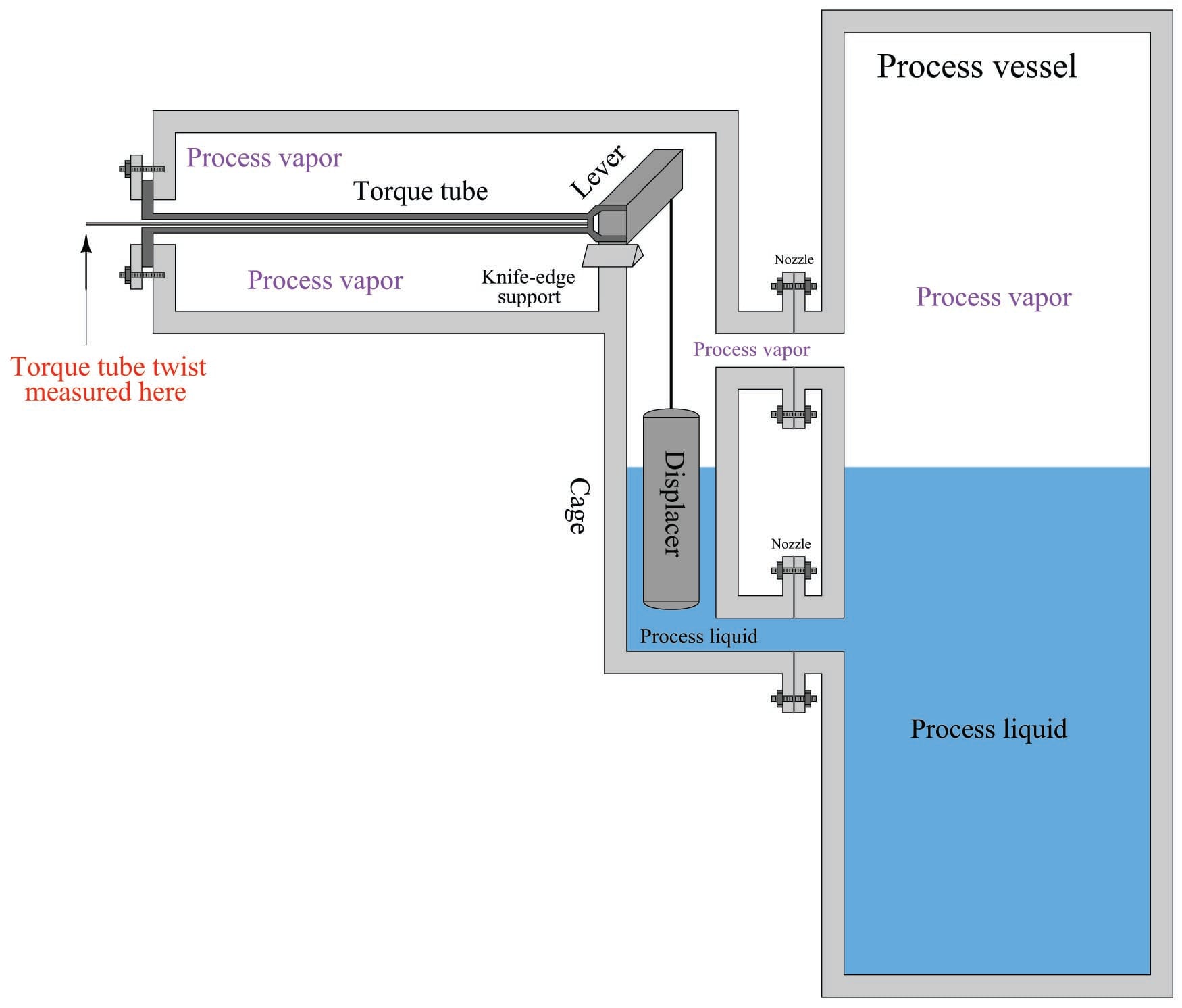
Seperti yang anda dapat lihat daripada ilustrasi ini, tiub tork mempunyai tiga tujuan berbeza apabila digunakan pada aplikasi pengukuran aras jenis penyesar: (1) berfungsi sebagai pegas kilasan yang menggantung berat penyesar, (2) untuk menutup tekanan bendalir proses daripada mekanisme pengesanan kedudukan, dan (3) untuk memindahkan gerakan dari hujung tiub tork ke dalam mekanisme pengesanan.
Dalam pemancar aras pneumatik, mekanisme penderiaan yang digunakan untuk menukar gerakan memutar tiub tork kepada isyarat pneumatik (tekanan udara) biasanya imbangan gerakan reka bentuk. Mekanisme Fisher Level-Trol, sebagai contoh, menggunakan tiub bourdon berbentuk C dengan muncung di hujungnya untuk mengikuti baffle yang dipasang pada rod kecil. Pusat tiub bourdon sejajar dengan pusat tiub tork. Apabila rod berputar, baffle mara ke arah muncung di hujung tiub bourdon, menyebabkan tekanan balik meningkat, yang seterusnya menyebabkan tiub bourdon melentur. Lenturan ini menarik muncung menjauhi baffle yang mara sehingga keadaan seimbang wujud. Oleh itu, gerakan rod diimbangi oleh gerakan tiub bourdon, menjadikannya sistem pneumatik pengimbang gerakan:

Pengukuran tahap antara muka anjakan
F
bdalamyang
dan
(
dalam
yang
paun
F
b
)
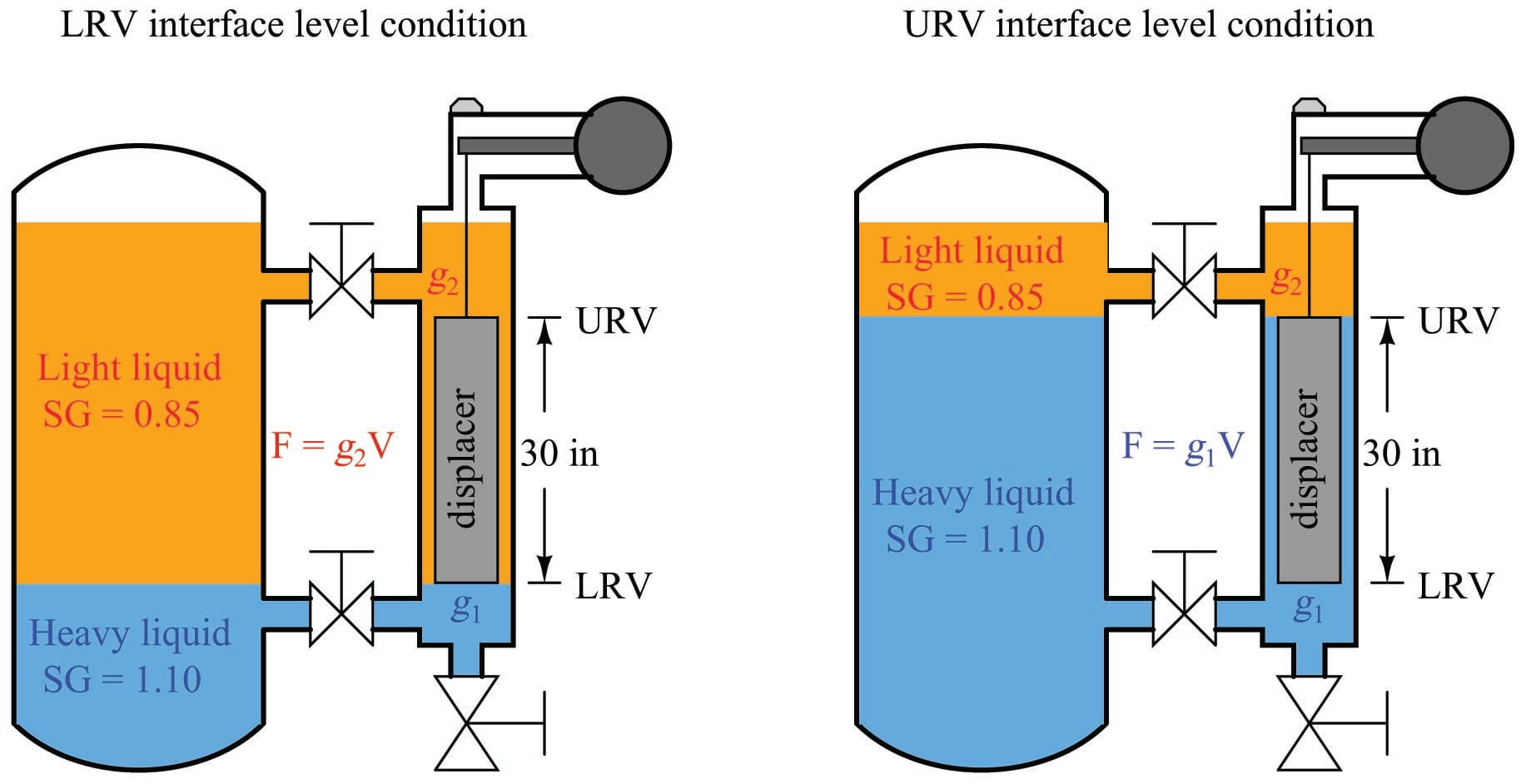
Showing the actual calculations for this hypothetical example:
The buoyancy for any measurement percentage between the LRV (0%) and URV (100%) may be calculated by interpolation:
| Interface level (inches) | Buoyant force (pounds) |
|---|---|
| 0 | 5.47 |
| 7.5 | 5.87 |
| 15 | 6.27 |
| 22.5 | 6.68 |
| 30 | 7.08 |